|
I am a fourth-year PhD Candidate in Center on Frontiers of Computing Studies (CFCS) at Peking University. , advised by Professor Hao Dong. Currently, I am a visiting PhD student at University of Illinois Urbana-Champaign (UIUC), advised by Professor Yunzhu Li. My research interests include computer vision and robotics. Email: wuruihai [at] pku.edu.cn |

|
|
|
|
Hanxiao Jiang, Binghao Huang, Ruihai Wu, Zhuoran Li, Shubham Garg, Hooshang Nayyeri, Shenlong Wang, Yunzhu Li ArXiv 2024 Spotlight Presentation at ICRA 2024 Workshop on Vision-Language Models for Manipulation project page / paper / code / video We formulate interactive exploration as an action-conditioned 3D scene graph (ACSG) construction and traversal problem. Our ACSG is an actionable, spatial-topological representation that models objects and their interactive and spatial relations in a scene, capturing both the high-level graph and corresponding low-level memory. |
|
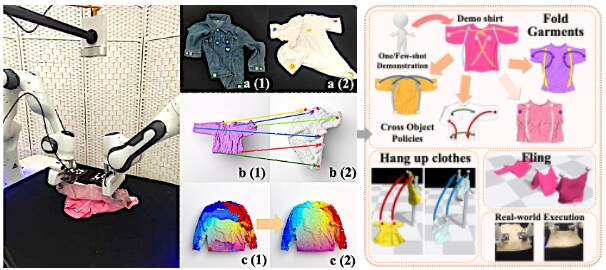
Ruihai Wu*, Haoran Lu*, Yiyan Wang, Yubo Wang, Hao Dong CVPR 2024 project page (coming soon) / paper (coming soon) / code / video (coming soon) We propose to learn dense visual correspondence for diverse garment manipulation tasks with category-level generalization using only one- or few-shot human demonstrations. |
|
Ruihai Wu*, Chenrui Tie*, Yushi Du, Yan Shen, Hao Dong ICCV 2023 project page / paper / code / video We study geometric shape assembly by leveraging SE(3) Equivariance, which disentangles poses and shapes of fractured parts. |
|
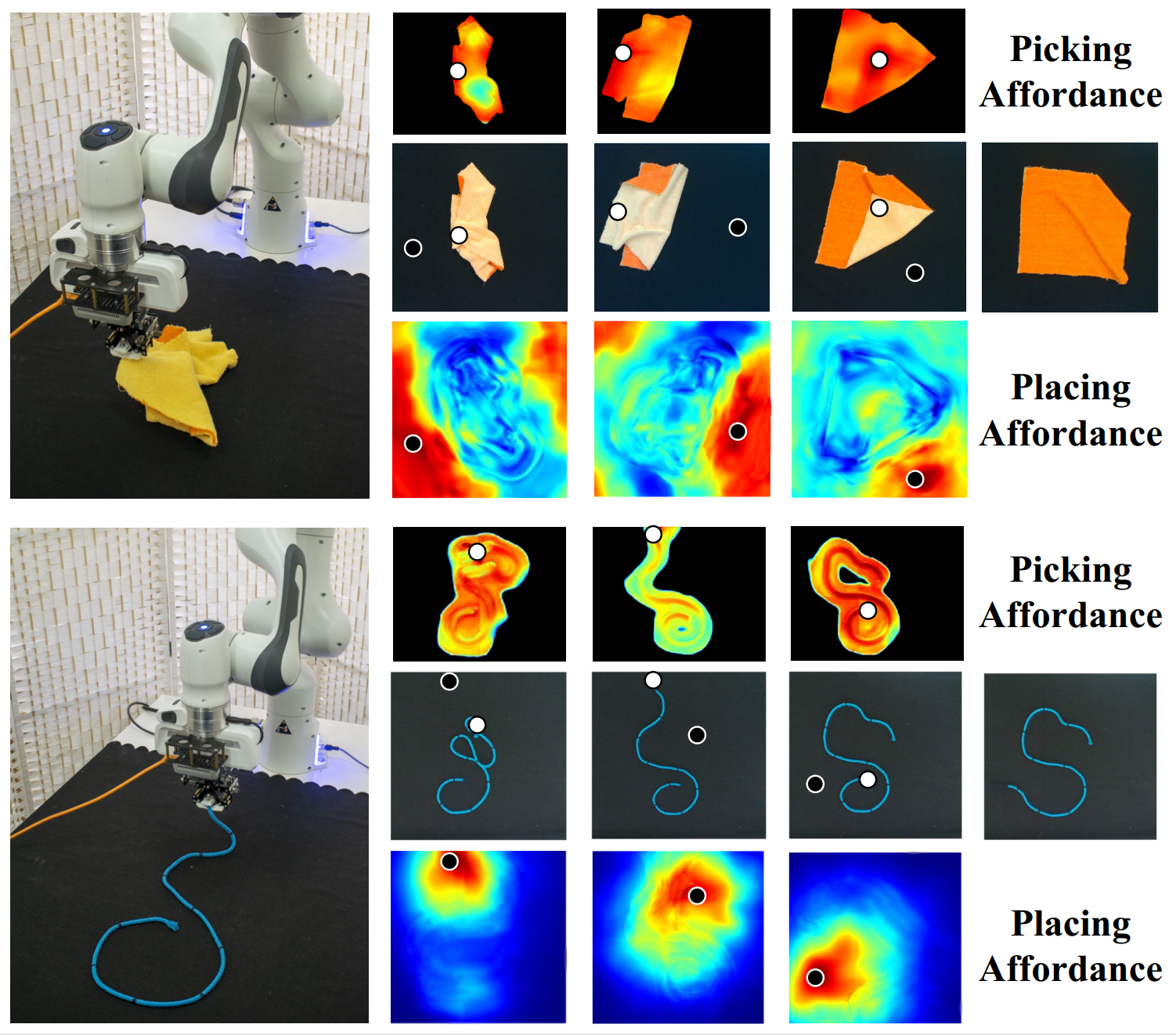
Ruihai Wu*, Chuanruo Ning*, Hao Dong ICCV 2023 project page / paper / code / video / video (real world) We study deformable object manipulation using dense visual affordance, with generalization towards diverse states, and propose a novel kind of foresightful dense affordance, which avoids local optima by estimating states’ values for longterm manipulation. |
|
Yan Zhao*, Ruihai Wu*, Zhehuan Chen, Yourong Zhang, Qingnan Fan, Kaichun Mo, Hao Dong ICLR 2023 project page / paper / code / video We study collaborative affordance for dual-gripper manipulation. The core is to reduce the quadratic problem for two grippers into two disentangled yet interconnected subtasks. |
|
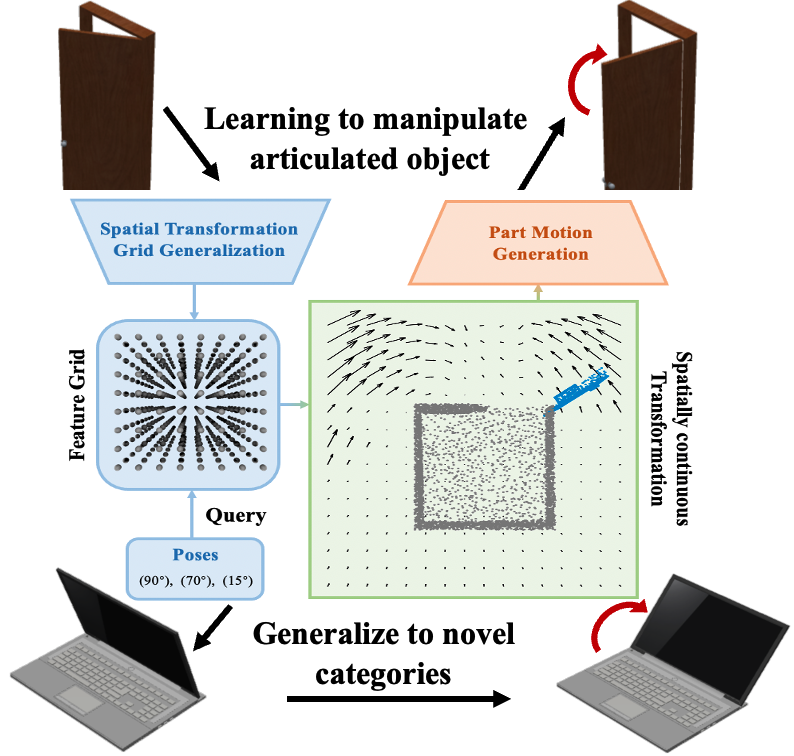
Yushi Du*, Ruihai Wu*, Yan Shen, Hao Dong BMVC 2023 project page / paper / code / video We introduce a novel framework that explicitly disentangles the part motion of articulated objects by predicting the movements of articulated parts by utilizing spatially continuous neural implicit representations. |
|
Yian Wang*, Ruihai Wu*, Kaichun Mo*, Jiaqi Ke, Qingnan Fan, Leonidas J. Guibas, Hao Dong ECCV 2022 project page / paper / code / video We study performing very few test-time interactions for quickly adapting the affordance priors to more accurate instance-specific posteriors. |
|
Ruihai Wu*, Yan Zhao*, Kaichun Mo*, Zizheng Guo, Yian Wang, Tianhao Wu, Qingnan Fan, Xuelin Chen, Leonidas J. Guibas, Hao Dong ICLR 2022 project page / paper / code / video We study dense geometry-aware, interaction-aware, and task-aware visual action affordance and trajectory proposals for manipulating articulated objects. |
|
Haoqi Yuan*, Ruihai Wu*, Andrew Zhao*, Haipeng Zhang, Zihan Ding, Hao Dong IROS 2021 project page / paper / code We train a forward model from video data only, via disentangling the motion of controllable agent to model the transition dynamics. |
|
Yihao Zhao, Ruihai Wu, Hao Dong ECCV 2020 project page / paper / code / video We propose adversarial consistency loss for image-to-image translation that does not require the translated image to be translated back to the source image. |
|
Ruihai Wu, Kehan Xu, Chenchen Liu, Nan Zhuang, Yadong Mu AAAI 2020 (Oral presentation) paper We propose localize-assemble-predicate network (LAP-Net), decomposing visual relation detection (VRD) into three sub-tasks to tackle the long-tailed data distribution problem. |
|
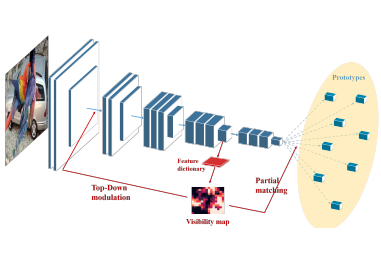
Mingqing Xiao, Adam Kortylewski, Ruihai Wu, Siyuan Qiao, Wei Shen, Alan Yuille ECCV 2020 Visual Inductive Priors for Data-Efficient Deep Learning Workshop paper We introduce prototype learning, partial matching and convolution layers with top-down modulation into feature extraction to purposefully reduce the contamination by occlusion. |
|
|
|
|
A deep learning and reinforcement learning library designed for researchers and engineers. ACM MM Best Open Source Software Award, 2017. I am one of the main contributors of its 2.0 version. GitHub / star (7000+) / fork (1600+) / contributors |
|
Umbrella research project behind Ideas in Excel of Microsoft Office 365 product. Intelligent feature announced at Microsoft Ignite Conference and released on March, 2019. Star of tomorrow excellent intern, 2019. project page |
|
|
|
Reviewer: ICCV 2021, CVPR 2023 Workshop on 3D Vision and Robotics (3DVR) , ICRA 2023, RAL
Volunteer: Wine 2020 |
|
|
| Deep Generative Models, 2020, 2022 |
|
|
|
Visual Representations for Embodied Agent, Chinese University of Hong Kong, Shenzhen, 2024
|
Visual Representations for Embodied Agent, China3DV, 2024
|
|
|
|
Nominee, Apple Scholarship (~9 in China), WorldWide, 2024
Finalist, ByteDance Scholarship (~3 in robotics track in China), China, 2023 Jiukun Scholarship (10 in School of CS), Peking University, 2023 Research Excellence Award, Peking University, 2019, 2022, 2023 Excellent Graduate, Peking University, 2020 Peking University’s Third-class Scholarship, Peking University, 2019 Star of Tomorrow Excellent Intern, Microsoft Research Asia, 2019 May Fourth Scholarship, Peking University, 2018 Academic Excellence Award, Peking University, 2018 Bronze medal in National Olympiad in Informatics (NOI), China Computer Federation, 2015 First prize in National Olympiad in Informatics in Provinces (NOIP), China Computer Federation, 2013, 2014, 2015 |
|
Website template comes from Jon Barron
Last update: April, 2024 |